配备Mag648低功耗磁通门传感器的水下滑翔器进行磁异常填图
发布时间:2021-02-19 会员:duncan
本案例探究了如何在水下滑翔器上安装低功耗、低噪声的Bartington仪器Mag648MXL磁场传感器,以进行磁异常测量。
磁异常被定义为该位置的磁场与地球参考场的偏差。这些测量可以用类似地形图的方式可视化。磁异常图可将在海洋结冰期间辅助无人机器人的导航,延长使用到夏季之后。
水下滑翔器是一种使用配重的特殊类型的无人机器人,在海洋环境监测领域描绘不同水层。水下滑翔器靠正负浮力循环控制下沉和上浮,并以锯齿状方式前进。每个任务将持续大约四周,跨域500英里。水下滑翔器的一个显著特征是在稳态滑翔过程中,电机和泵的动态噪声很低。
导航
滑翔器在水下使用航位推算法,结合水平和下潜速率、航向和磁罗盘估算位置。由于速度估计的不确定性和未知海流的存在,位置估算的误差随着时间的推移而增加,所以必须通过每隔几个小时浮出水面来获取GPS定位。
需要浮出水面进行位置更新,这是一个相当大的缺点,特别是在一些不能上浮的区域,例如冰雪覆盖的拉布拉多海和纽芬兰北海岸的地区。为了在冰季帮助导航,需要配备有下述的磁传感器设备的水下滑翔器,在无冰季节创建该区域的磁异常图。
磁传感器设备
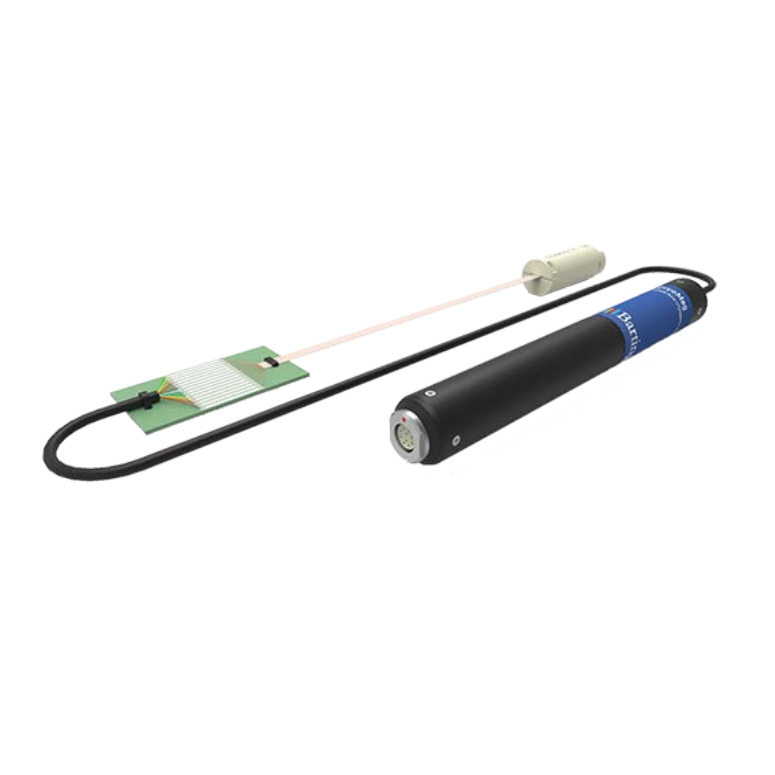
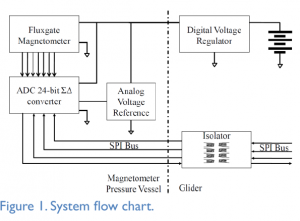
图1是描述Mag648传感器集成到滑翔器系统中的信号流程图。AD7794一个24位Σ-Δ型ADC , 通过串行外围设备接口(SPI)连接数字隔离器。该传感器有一个专用的电池组,其中包含三个主要的锂AA电池,可以运行约30天-大约与滑翔器服役时间相同。 最终集成到滑翔器的系统,能够具有在1Hz或0.025 nTrms /√Hz处全量程约22位的有效分辨率。该分辨率仅比Mag648公布的0.01 nTrms /√Hz的精度稍大。

校准(calibration)
在理想情况下测量时,不考虑仪器的方向,测量的时间变化磁场应该是显示恒定的大小。但是,由于传感器安装在包含各种铁磁性部件(如电池和其他物品)的设备内,因此必须校准设备对测量的影响。而且仪器本身也对测量有影响。
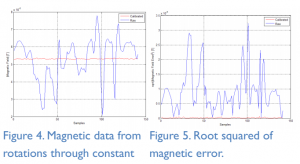
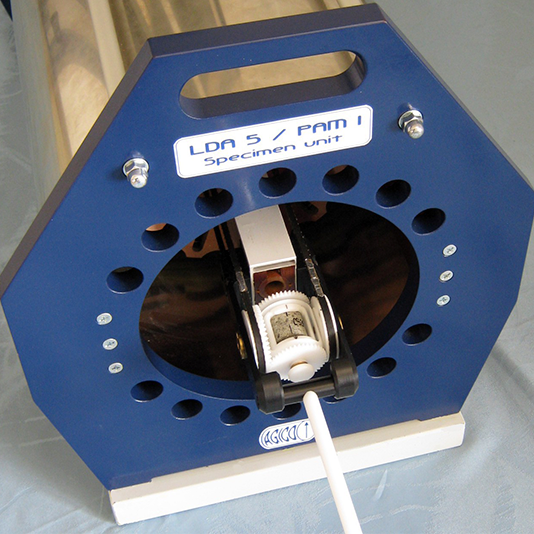
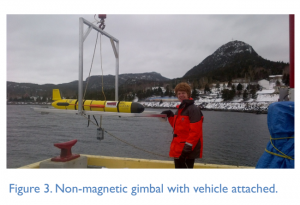
为了实现此校准,将测量的失真视为集总效应,其会导致测量结果的比例,偏移和旋转。为了找到这些参量,将设备置于非磁性转向台上(见图3),并通过所有三个轴旋转以覆盖测量空间,同时记录幅值(见图4、5)。 然后将椭球体拟合到该数据(见图6),可以通过找到将椭球体转换为以原点为中心的球体的条件(见图7)来估计校准参数(见图7)[1]。 校正后的数据可以通过减去偏差并去除旋转和缩放比例来估算,如[2]:hc = S-1R’(hr – b),其中S是比例矩阵,R是旋转矩阵,b是偏差, HR是原始磁数据,而HC是校准磁数据。

结论(conclusion)
截至2012年4月,该系统的校准工作已接近完成,今年夏天将进行现场试验以收集数据并开始绘制地图。
引文(References)
[1] Petrov, Yuri..“椭球拟合”,MATLAB中央文件交换,2009年。
[2] Vasconcelos JF,Elkaim G,Silvestre C,Oliveira P,CardeiraB。《捷联磁力计校准传感器框架的几何方法》 航空航天和电子系统,IEEE事务。2011年4月; 47(2):1293-1306。
扫一扫了解更多

关注我们
优赛寰宇

关注我们
古地磁通讯

关注我们
磁测量专家